


Designed specifically for single-direction motor applications, it provides clean high-frequency PWM control through an efficient MOSFET output stage. The result is a smaller, lighter, and more purpose-built solution for impeller systems and competition robots.

The Universal Speed Controller is a compact MOSFET-based driver for precise PWM control of single-direction DC motors. Designed for impellers, fans, and other PWM-driven loads, it delivers efficient high-frequency motor control with low heat generation and seamless compatibility with Arduino, STM32, ESP32, and similar platforms.
High-efficiency MOSFET switching

30kHz+ PWM support for smooth control

ACCESSORIES
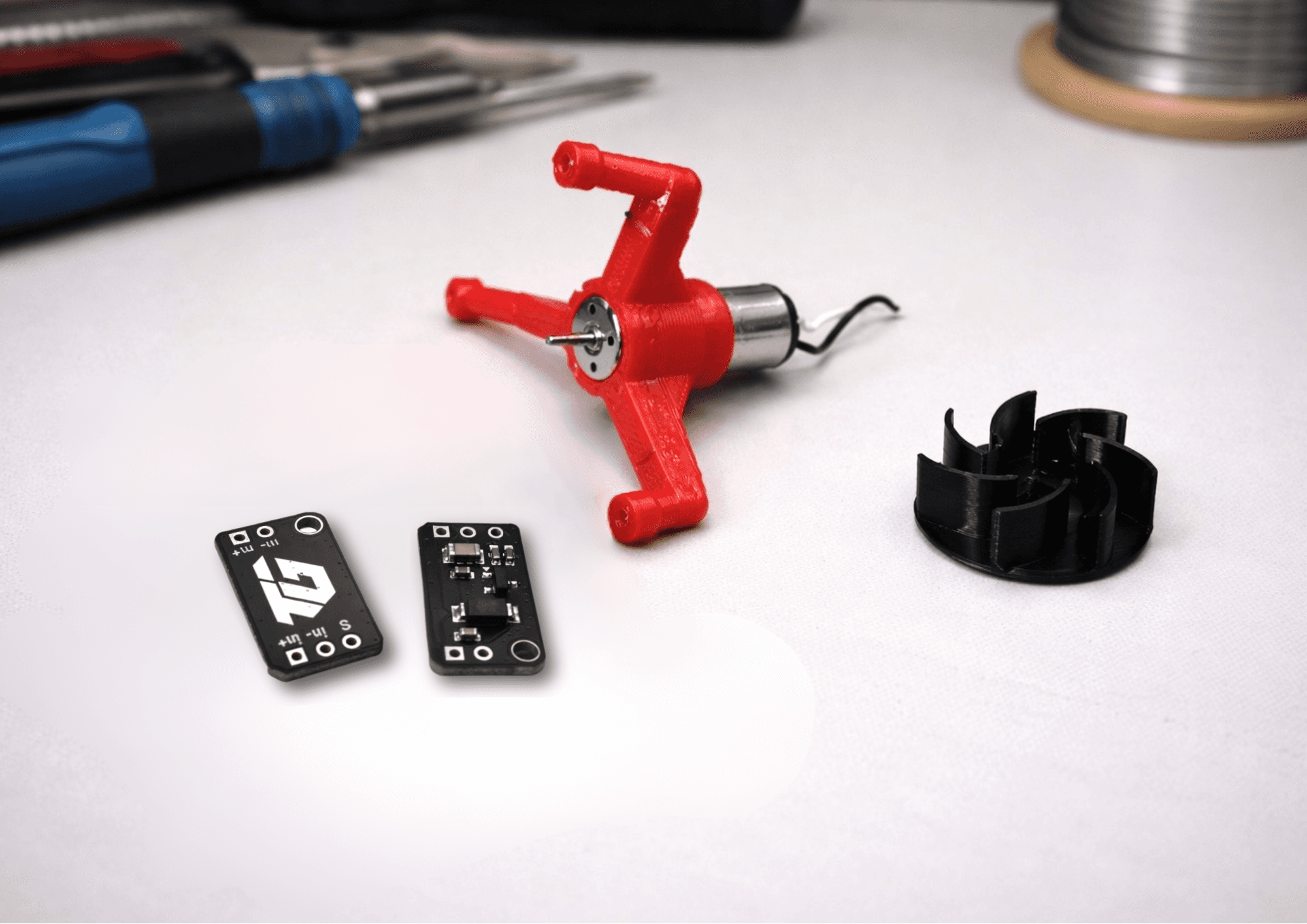
PACKED COMPONENTs
Good things come in small packages, and inside of
this you will find everything you need to get your
line follower up and running. Both hardware and
software included.

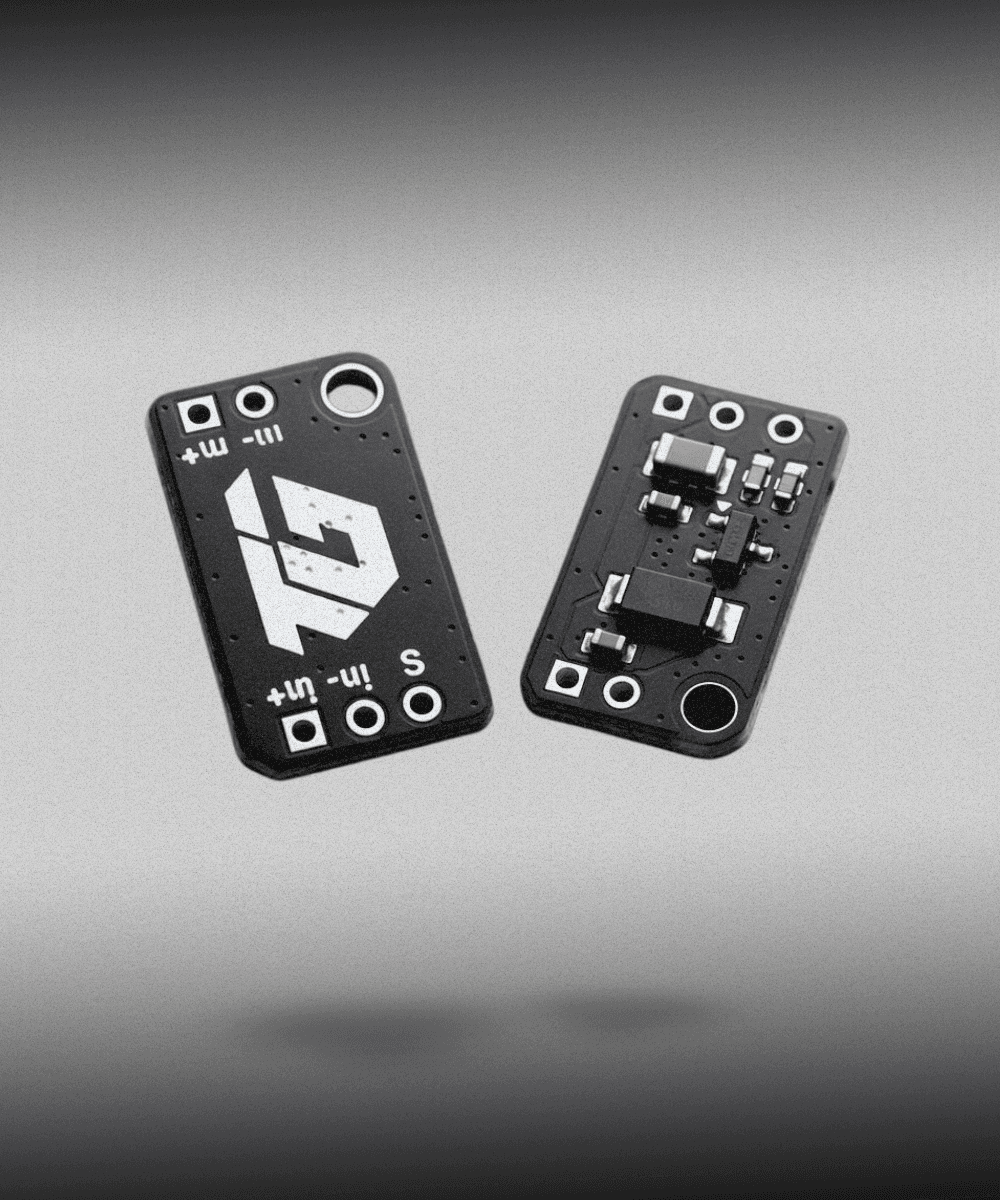
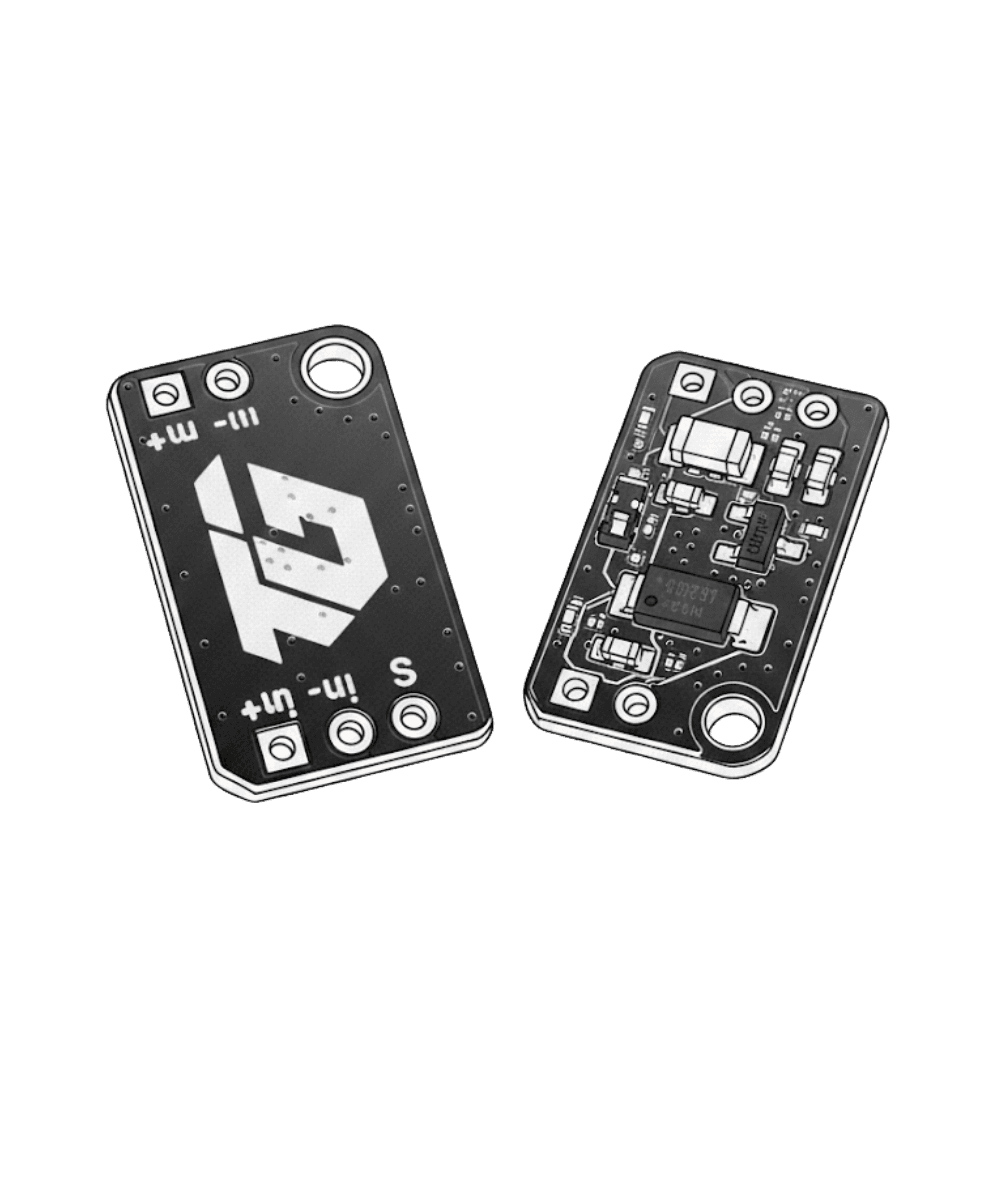
◘ The Universal Speed Controller (USC) is a compact single-channel MOSFET driver designed for precise PWM control of DC motors and impeller systems. Operating from a 3V–5V supply, it accepts both 3.3V and 5V logic signals for seamless integration with modern microcontrollers.
◘ Its high-efficiency switching stage supports continuous currents up to 5A while minimizing power losses and heat generation. This makes the USC particularly well suited for high-speed coreless motors and suction impeller applications.
◘ The controller supports PWM frequencies above 30kHz, enabling smooth speed regulation, reduced audible noise, and highly responsive motor performance when driven from hardware timer outputs.
◘ Compatible with Arduino, STM32, ESP32, RP2040, and similar platforms, the USC provides a lightweight, space-efficient solution for impellers, cooling fans, and other single-direction motor loads where reliability and efficiency are critical.
SOFTWARE AND PROCESSING
◘ The Universal Speed Controller is driven by a microcontroller-generated PWM signal. On platforms such as the ATmega328P, hardware timers can be configured in Fast PWM mode through direct register manipulation, enabling precise motor speed control with minimal CPU overhead.
◘ The USC input may be connected to any hardware PWM-capable output pin, for example, D11 (OC2A) on an Arduino Nano. Once configured, the timer peripheral generates the PWM waveform independently of the main program loop, ensuring stable and consistent operation.
◘ Motor power is regulated by adjusting the PWM duty cycle associated with the selected timer channel. Since the USC uses a MOSFET-based switching stage, duty cycle changes directly control the average voltage delivered to the motor, providing smooth and responsive speed adjustment.
◘ Operating at high PWM frequencies (typically 30kHz and above), the USC delivers efficient power transfer, reduced switching losses, and improved motor response, making it well suited for impellers, cooling fans, and other single-direction motor applications.
Reviews (0)
01
Can the USC reverse the direction of a motor?
02
What PWM frequency should I use with the USC?
03
What types of motors can be used with the USC?
04
Can TechGeeks products be used for schools or institutions?
05
What is Techgeeks?
06
Do you offer support after purchase?
07
Do you ship across India?
08
How long does delivery take?
09
Do you ship internationally / overseas?