




The Spirit is engineered from the ground up as a single monolithic platform where the circuit board itself carries the structural load, the downforce unit, the motor mounts, and every electronic component in one rigid, competition-ready airframe. One uncompromising philosophy. The Spirit gives you the hardware foundation to go as fast as the track allows and then a little faster.


The Spirit is the bridge between a standard suction LFR and a purpose-built competition weapon. With its monolithic PCB-chassis, centrifugal impeller, and pre-soldered SMD peripherals, it removes every layer of mechanical complexity between you and maximum speed. Focus on code. Focus on tuning. The hardware is already done.
HARDWARE
◘ Embedded Systems
◘ Impeller Downforce Mechanics
◘ Sensor Integration
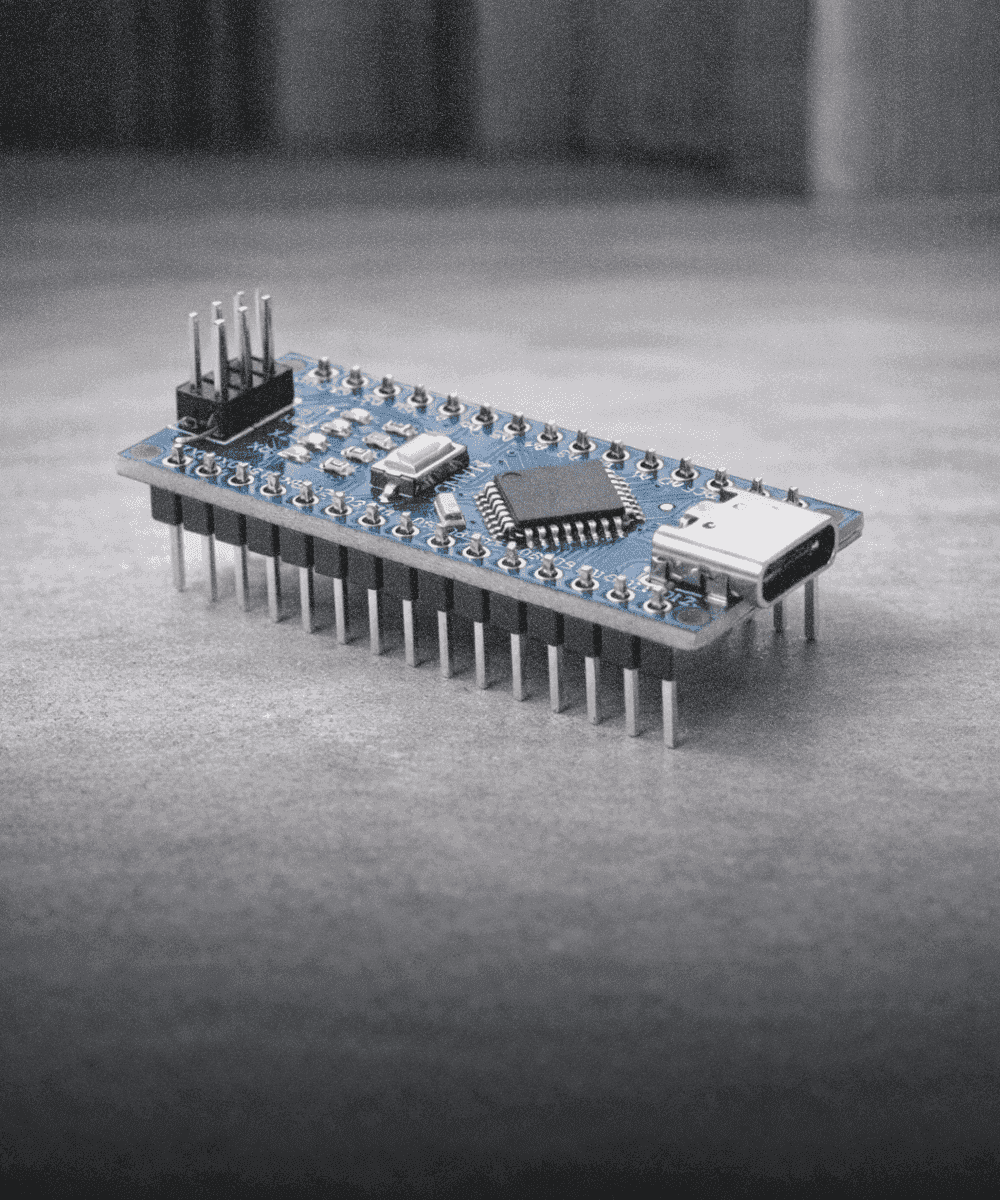
◘ Microcontroller
◘ PCB Designing
◘ SMD Peripherals
◘ Centrifugal Impeller
◘ Power Rail Architecture
SOFTWARE
◘ Bare metal C Programming
◘ Control Theory & PID
◘ Algorithm Designing
◘ PWM Frequency Optimization
◘ Parameter Tuning
◘ Low level optimization
◘ Timer Architecture


SPIRIT PCB-CUM-CHASSIS

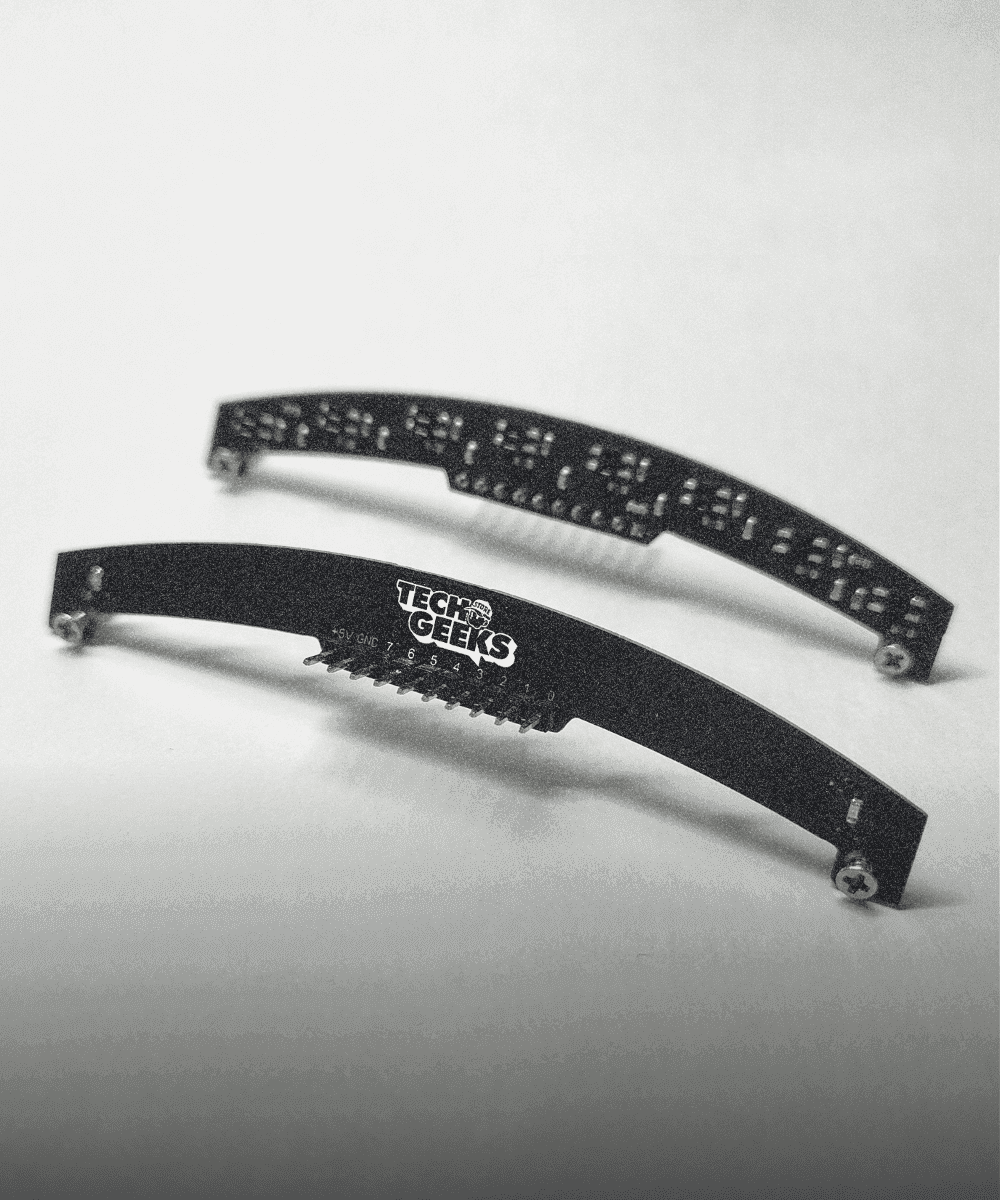
ARC8 8 ARRAY SENSOR
ACCESSORIES
PACKED KIT
Good things come in small packages, and inside of
this you will find everything you need to get your
line follower up and running. Both hardware and
software included.


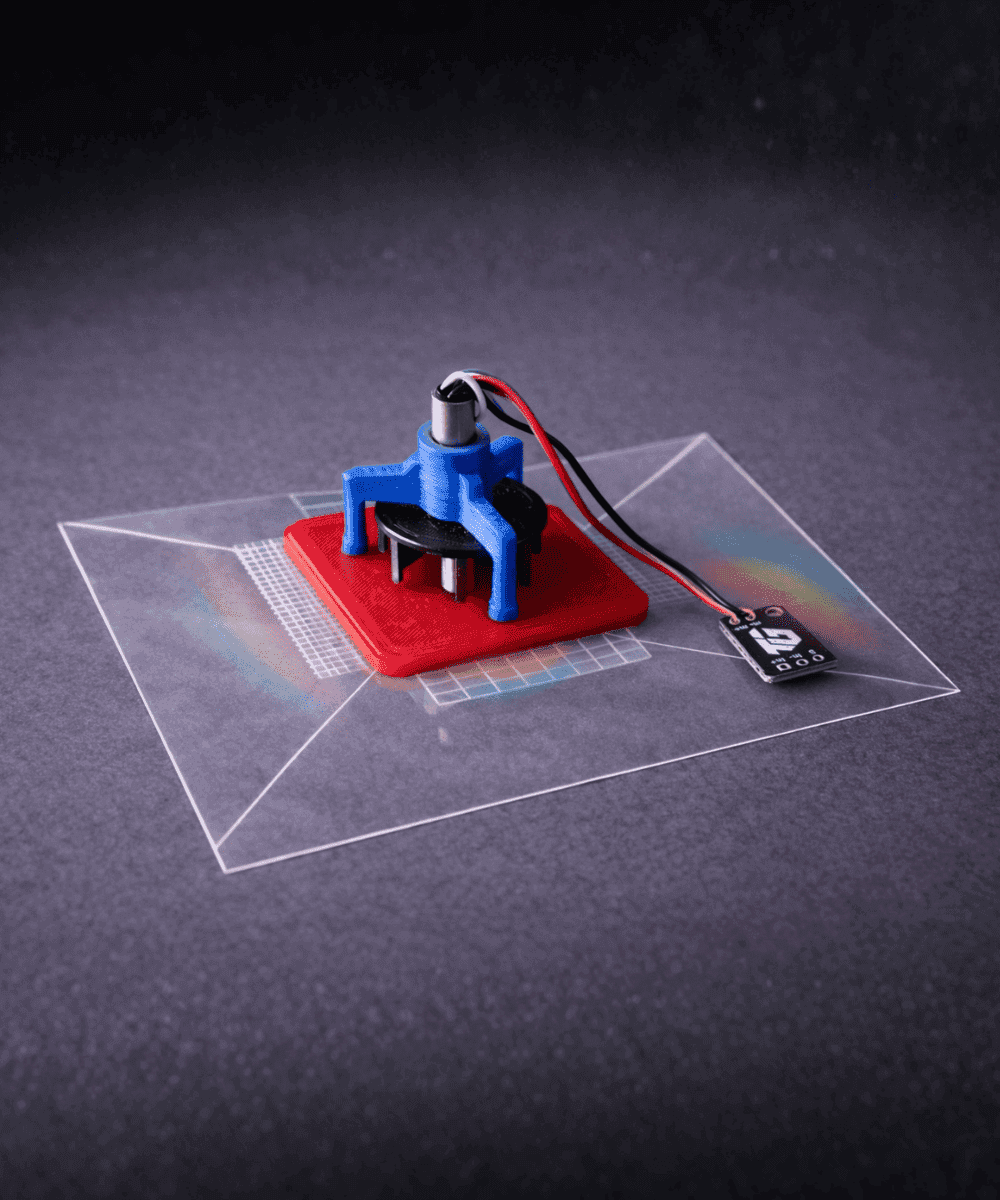
IMPELLER SETUP
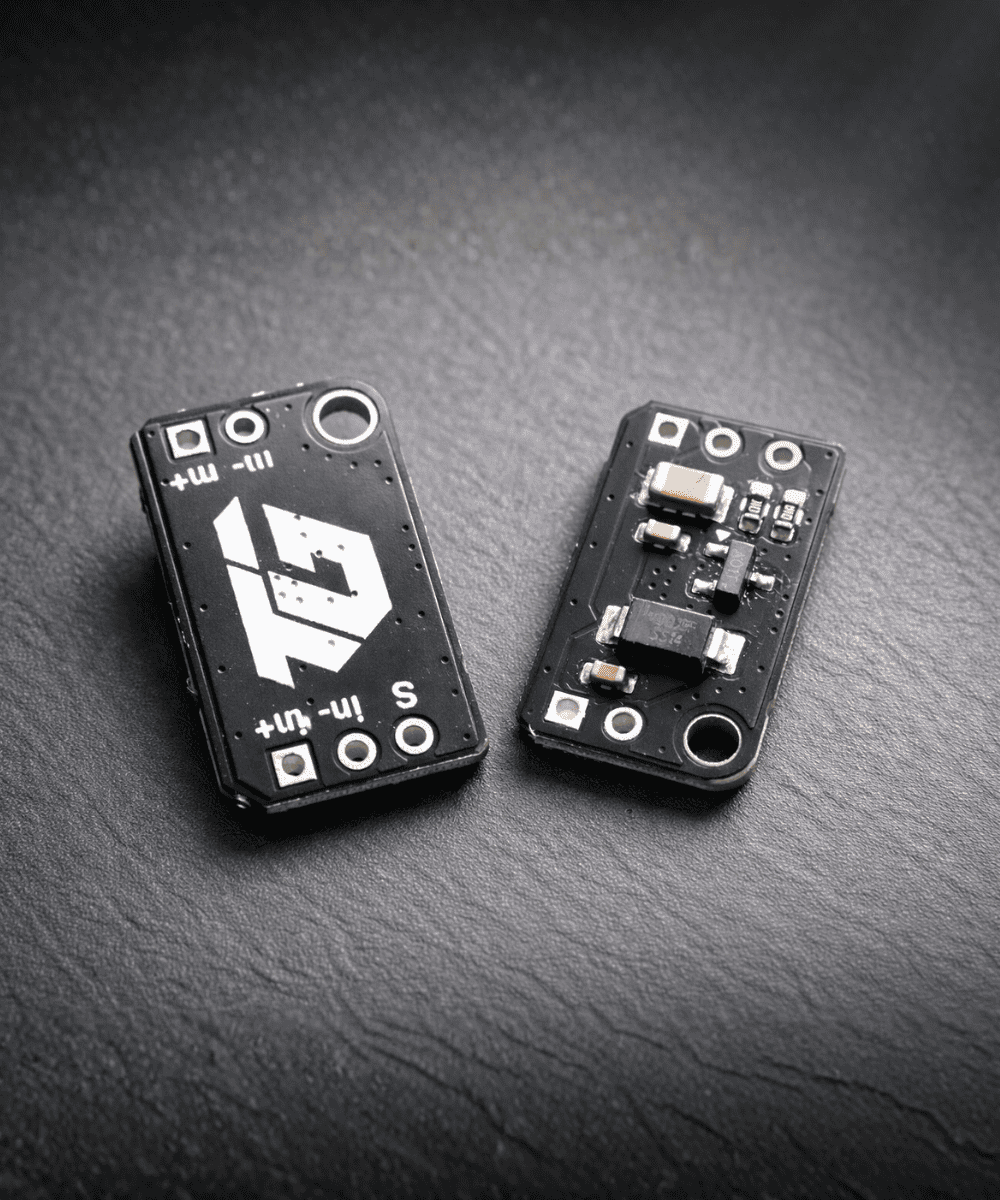
UNIDIRECTIONAL SPEED CONTROLLER
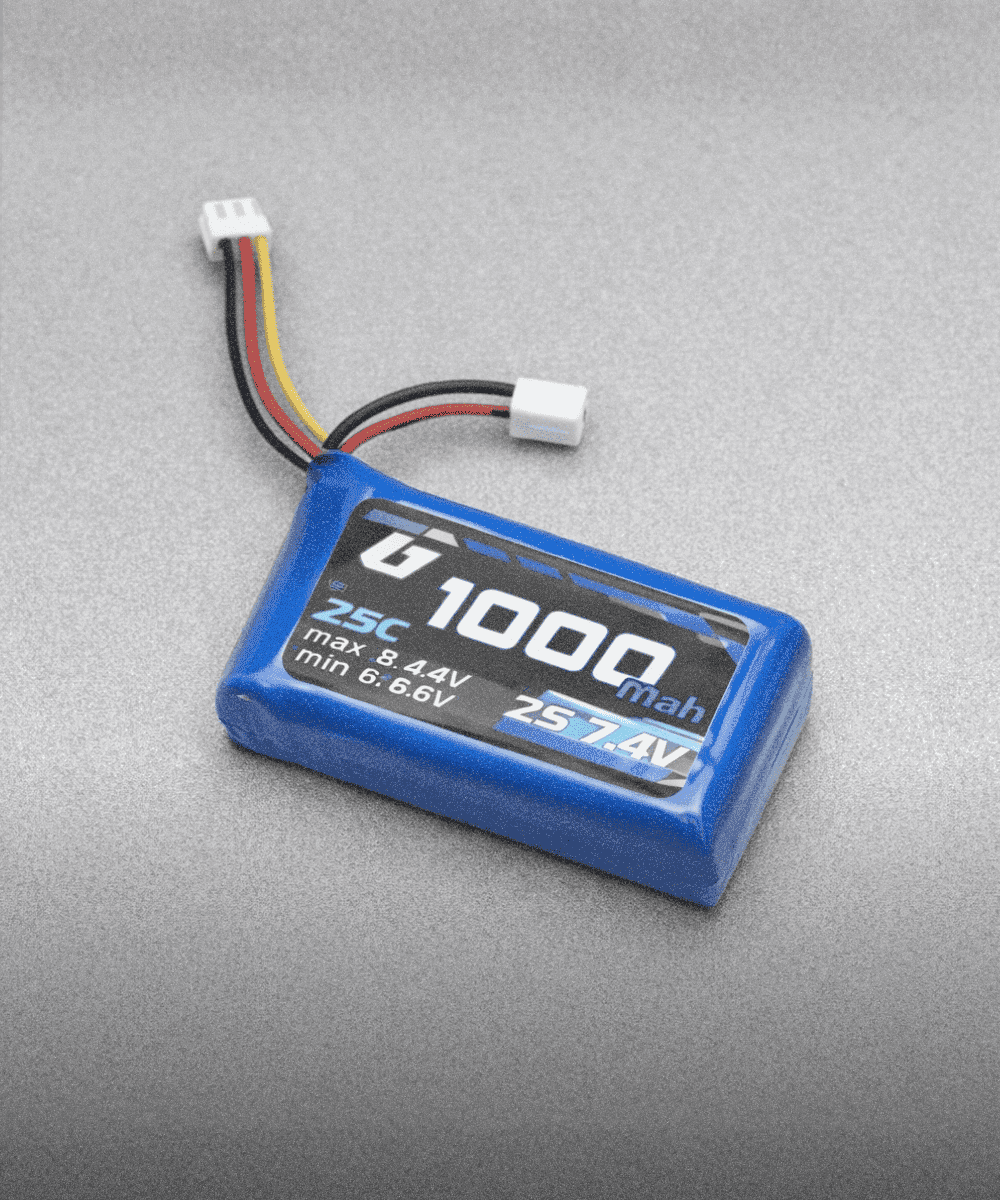
COMPACT Li-Po BATTERY
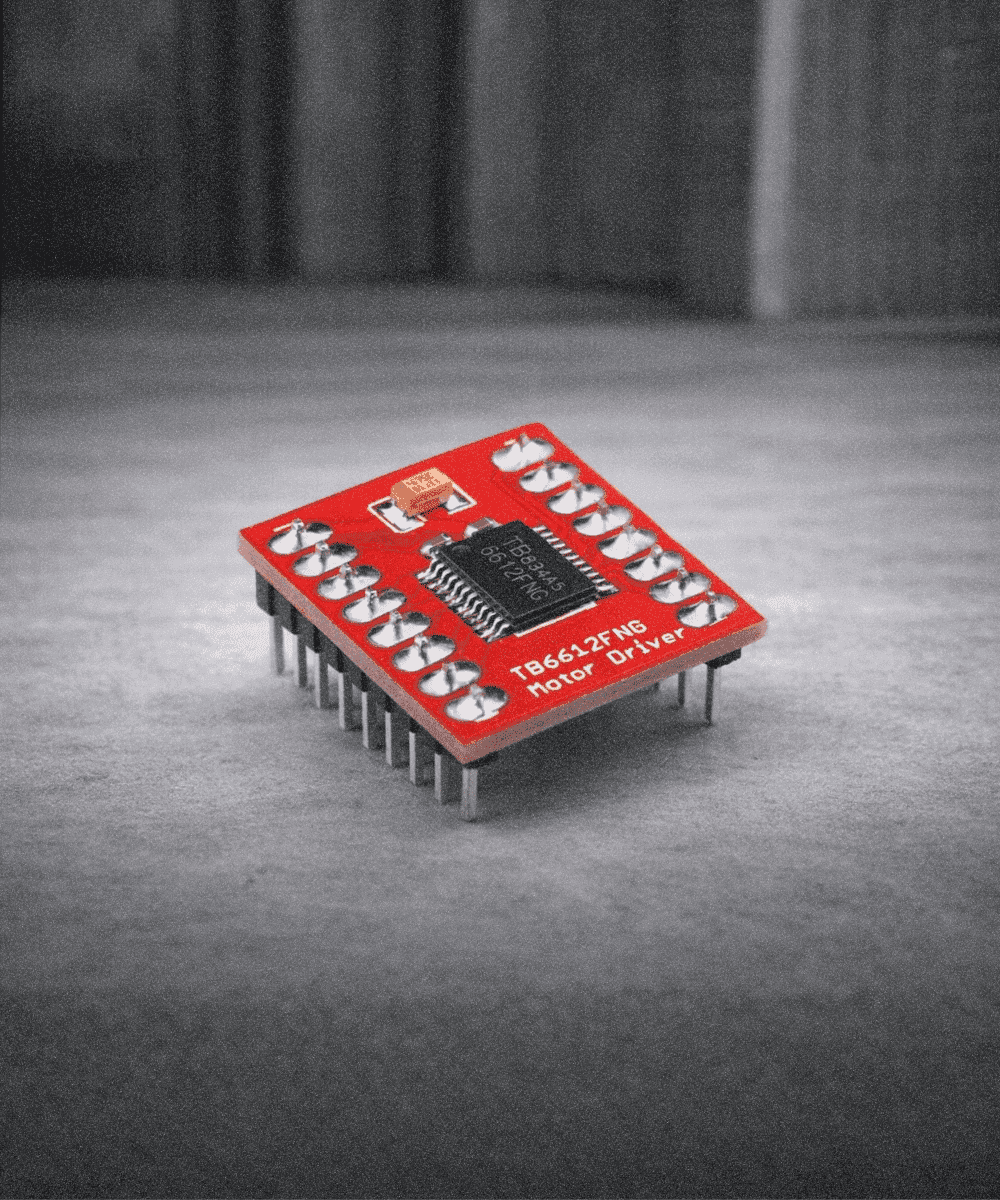
TB6612FNG MOTOR DRIVER


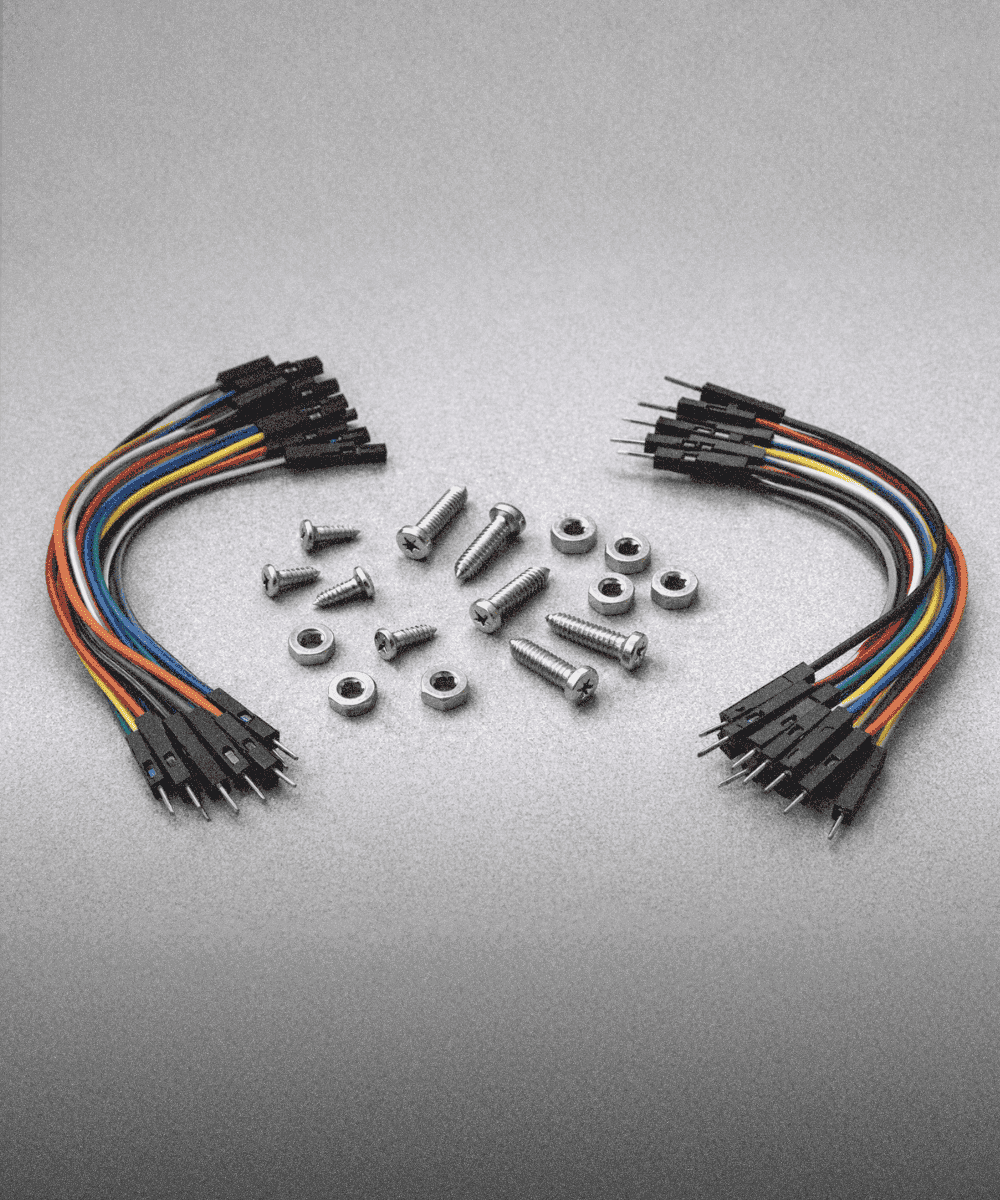
CABLES, SCREWS & FASTENERS
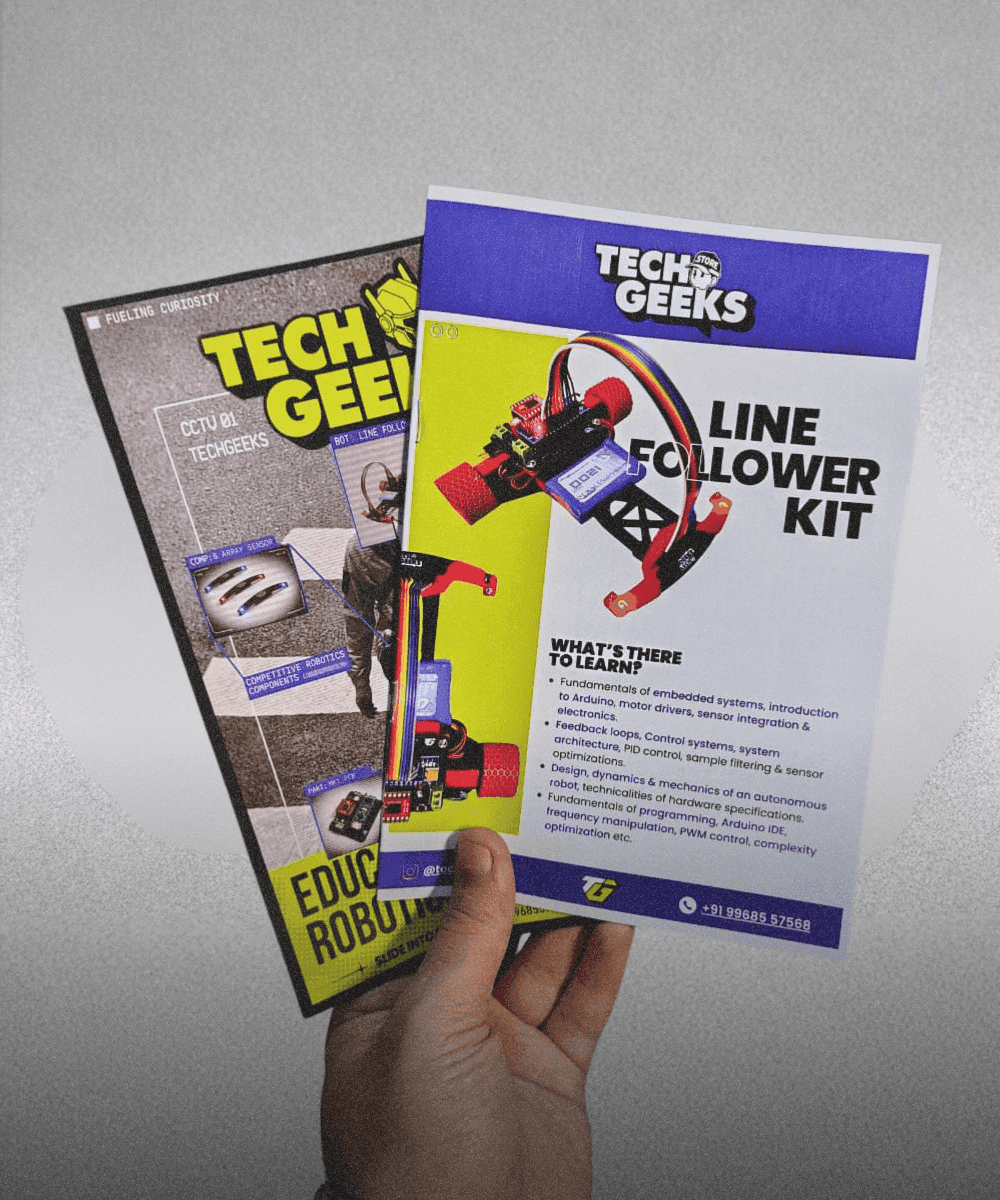
COMPREHENSIVE GUIDE

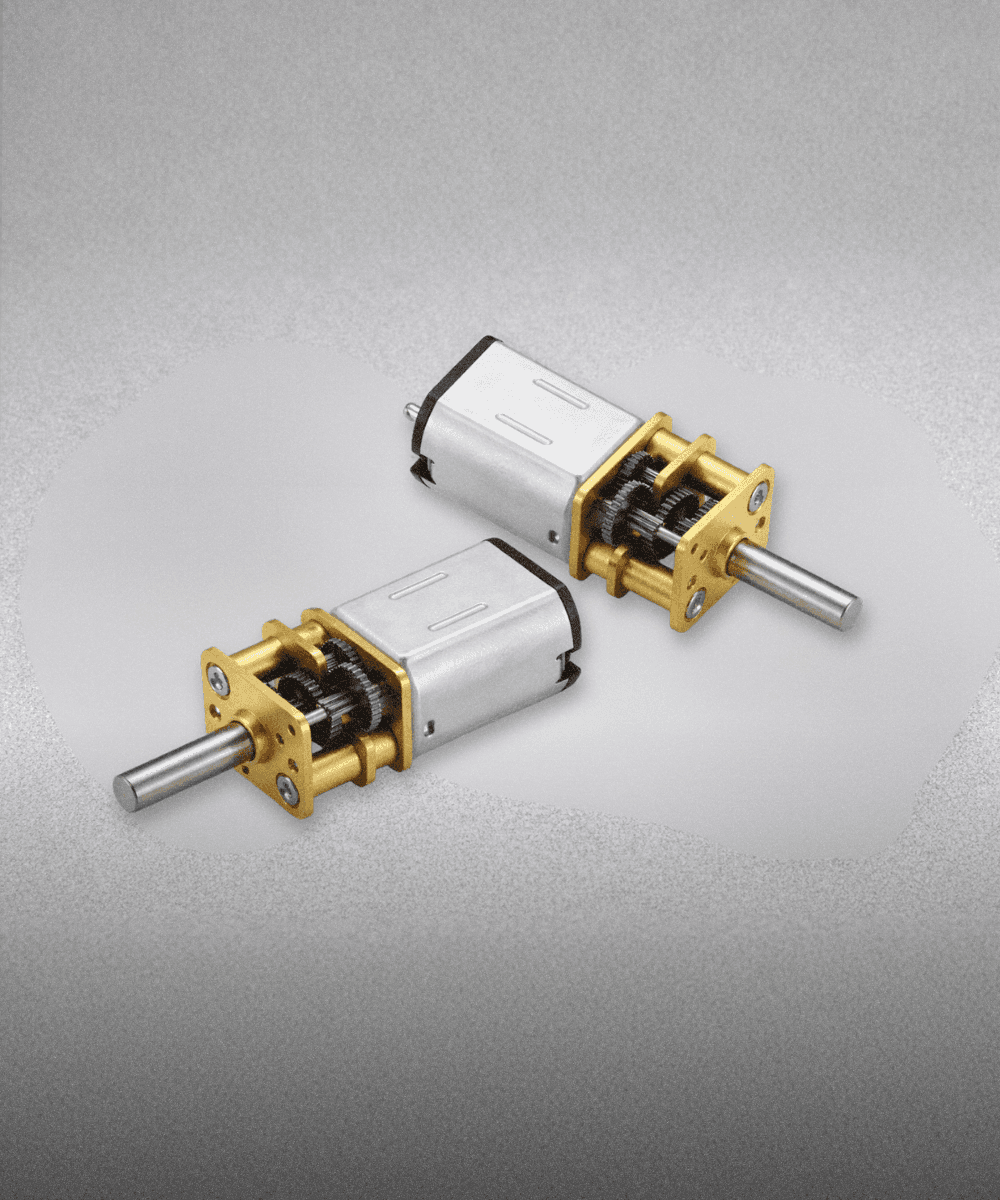
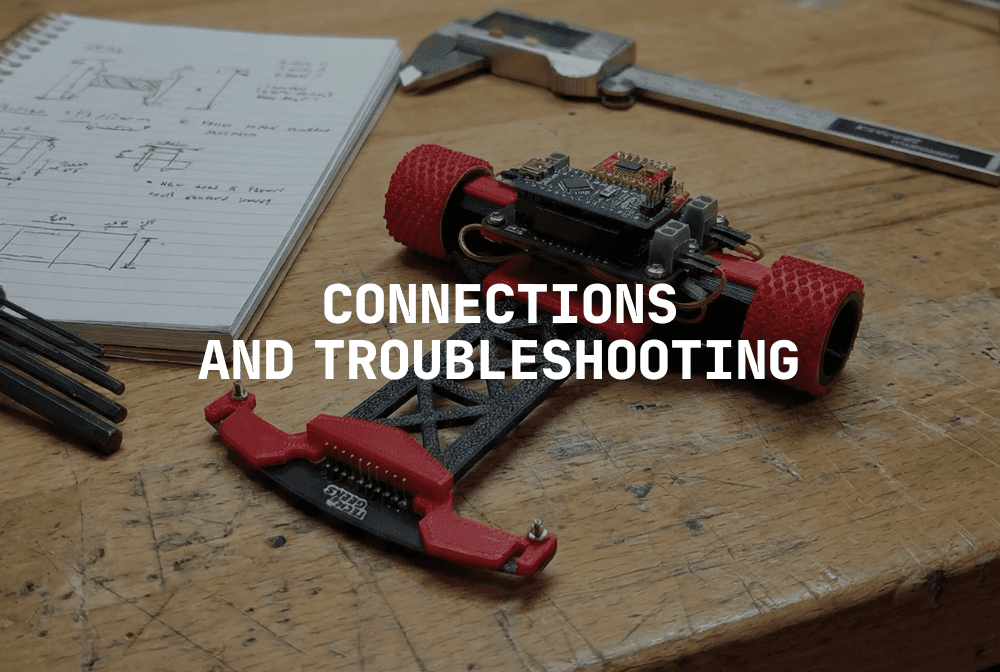
◘ The Spirit LFR is a high-speed suction line follower built around the Spirit PCB platform. It employs a differential-drive architecture with dual N20 geared motors, an active suction system and an Arduino Nano-based control system to achieve stable high-speed operation on competitive line-following tracks.
◘ The active downforce system consists of an 8520 coreless brushed DC motor, a 30 mm centrifugal impeller, a MOSFET-based unidirectional speed controller (USC) and a custom vacuum skirt, generating over 700 g of downforce. The impeller is driven at 62.5 kHz PWM through direct Timer2 register control, eliminating audible switching noise while improving efficiency.
◘ Line sensing is performed using an 8-channel analog infrared sensor array sampled directly by the ATmega328P ADC. Differential steering is achieved through a real-time PID controller driving the onboard TB6612FNG motor driver, with configurable gains, automatic sensor calibration and adjustable operating parameters for different track conditions.
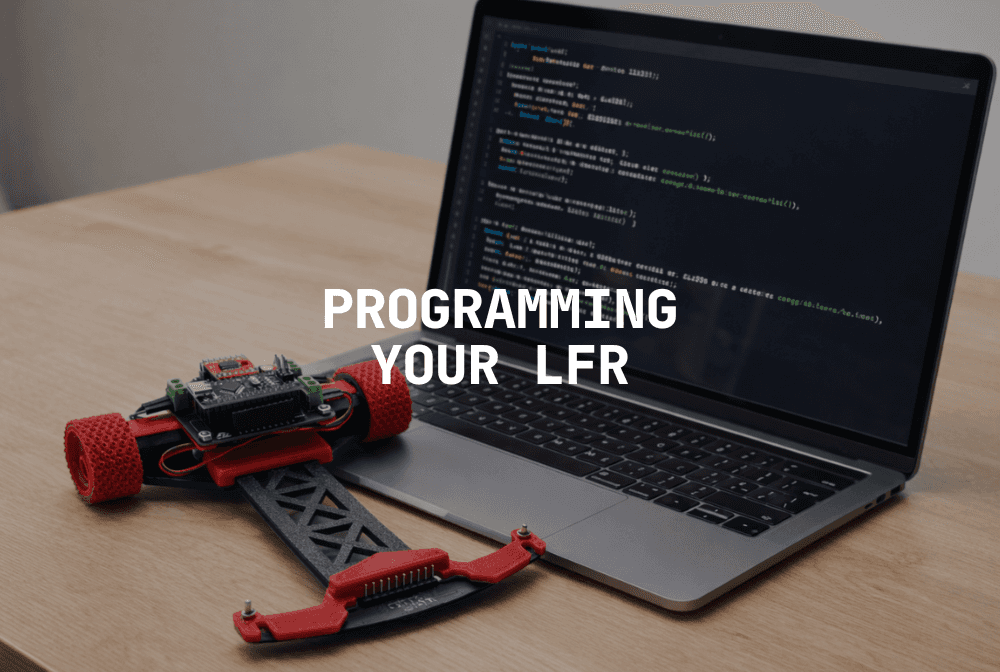
◘ The firmware is implemented in bare-metal C using direct register access for PWM generation, ADC sampling and digital I/O. The software architecture combines deterministic timing, state-based navigation routines and configurable motor profiles to support high-speed operation on complex competition tracks.
SOFTWARE AND PROCESSING
◘ The Spirit LFR firmware combines Arduino framework functions with direct AVR register programming. During calibration, the robot rotates while recording the minimum and maximum values of each sensor channel. Motor control is performed using Arduino PWM functions, while the impeller is driven through direct Timer2 register control at 62.5 kHz.
◘ Pressing the left button initiates the calibration sequence, while pressing the left button again starts the impeller. Now pressing the right button makes the robot enter run mode and continuously execute the control loop, where sensor data is acquired,
processed and evaluated to determine the line position.
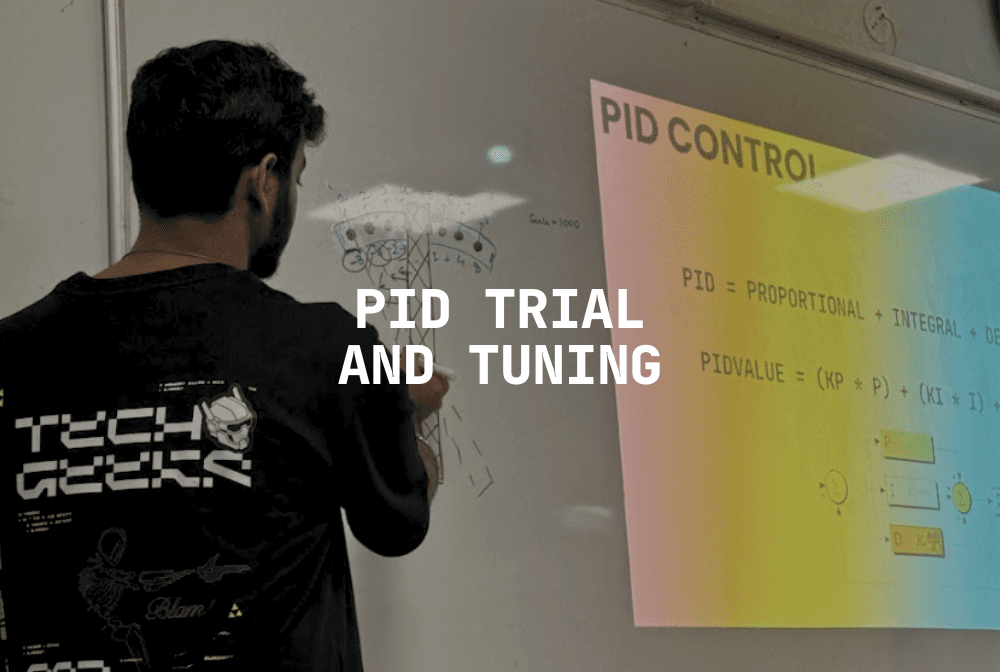
◘ A PID controller computes the steering correction from the measured line position. The calculated correction is applied by varying the left and right motor speeds about a configurable base speed, with PWM duty cycles updated continuously during operation.
◘ If the line is lost, the controller uses the previously calculated error to determine the recovery direction until the track is reacquired. Operating parameters including motor speed, PID gains and impeller speed can be adjusted directly within the firmware to suit different track conditions.
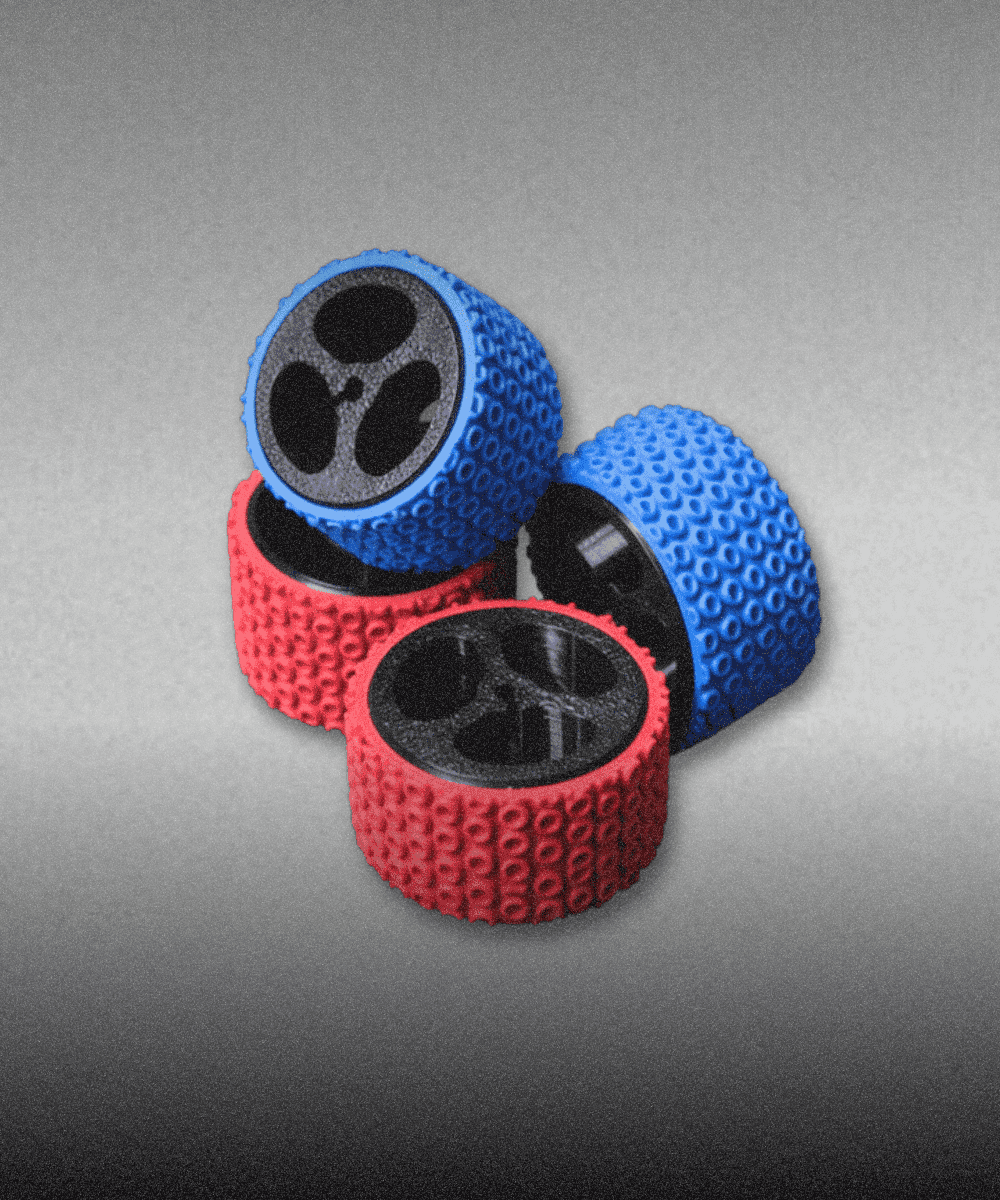
COLOR, MATTE
AND FINISH
Available in four color options for the mounts and wheels, the robot features a high performance PCB-cum-chassis paired with high-traction rubber wheels and cleanly integrated components, delivering a cohesive, durable, and competition-ready finish.
*All the media present are for visual representation purposes only, actual product may vary.

Specifications.



Reviews (0)

01
What is the Spirit LFR?
02
Can I modify the firmware?
03
What is the X Pad and Y Pad?
04
Is the Spirit LFR suitable for competitions?
05
What is Techgeeks?
06
Do you offer support after purchase?
07
Do you ship across India?
08
How long does delivery take?
09
Do you ship internationally / overseas?



