
DESCRIPTION
Explore the complete ecosystem for Suction Impeller setup including code, guides and learning resources below.
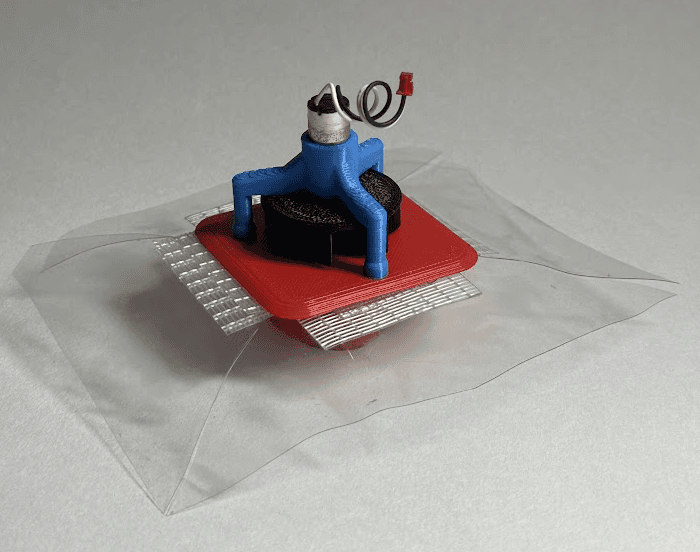
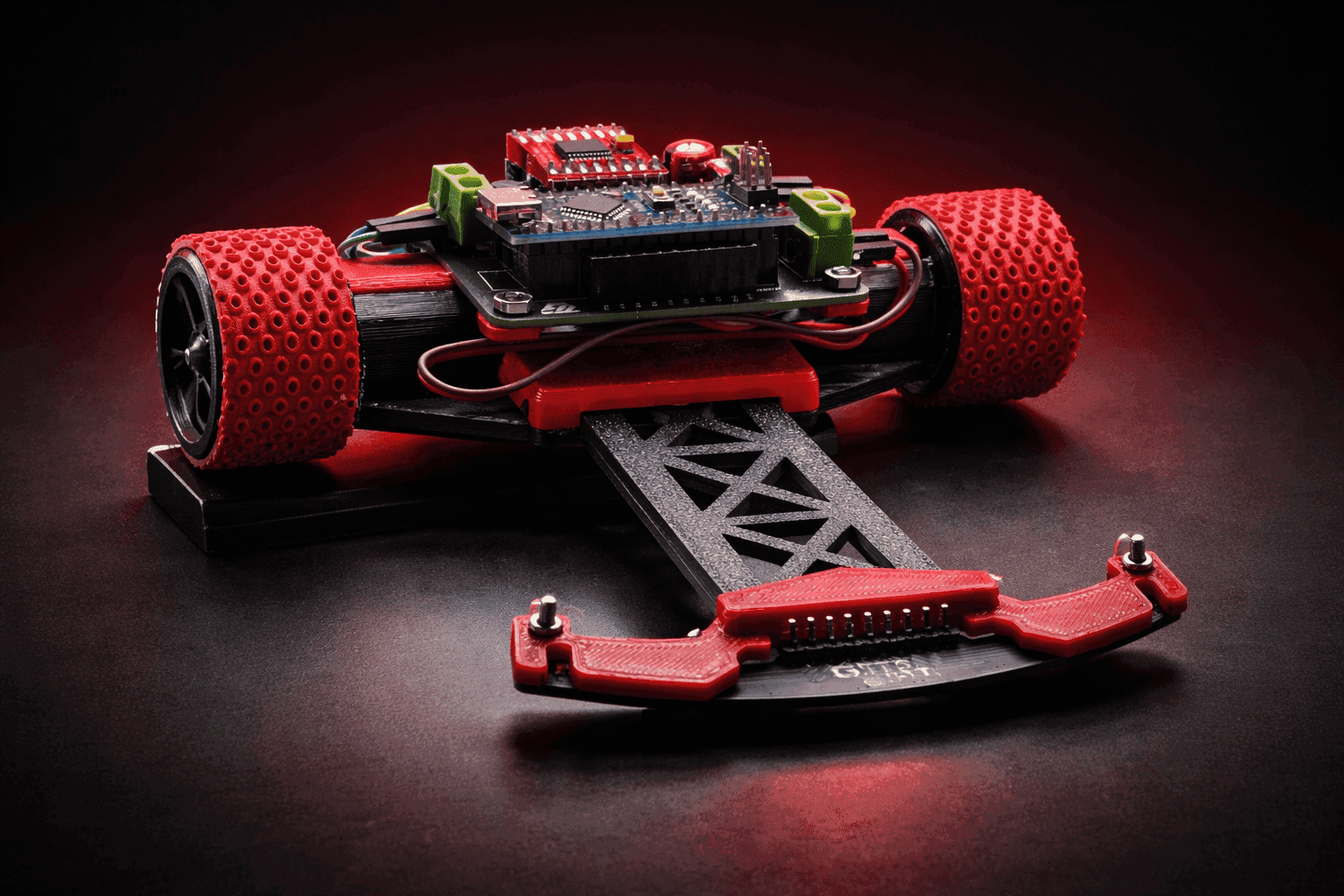
We crafted this impeller setup for builders seeking peak performance from their LFR. At high speeds, where passive grip begins to fade, it generates controlled negative pressure beneath the chassis to strengthen surface contact and maintain stability. Compact and intentional in design, it delivers added control precisely when high-speed runs demand it.
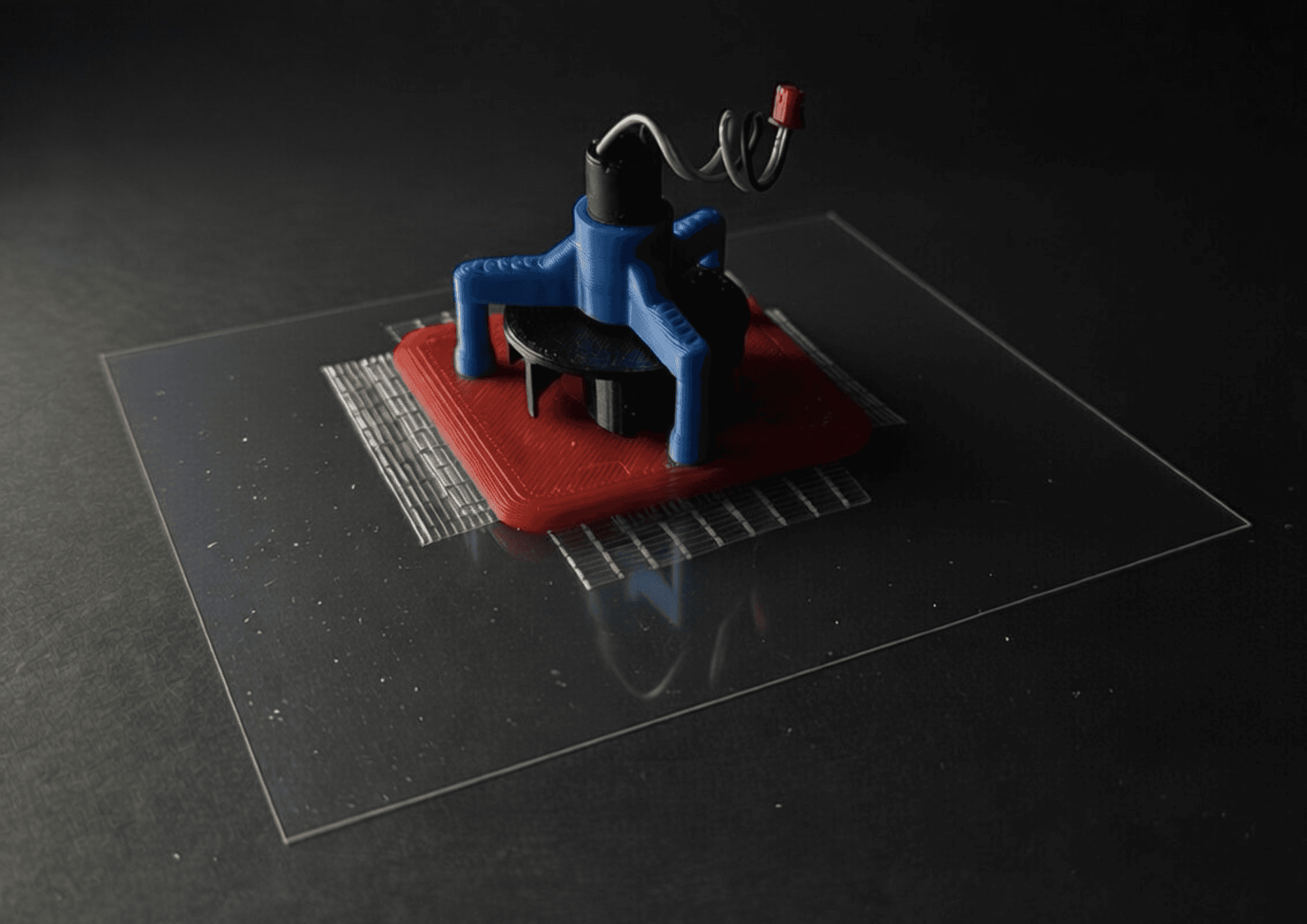
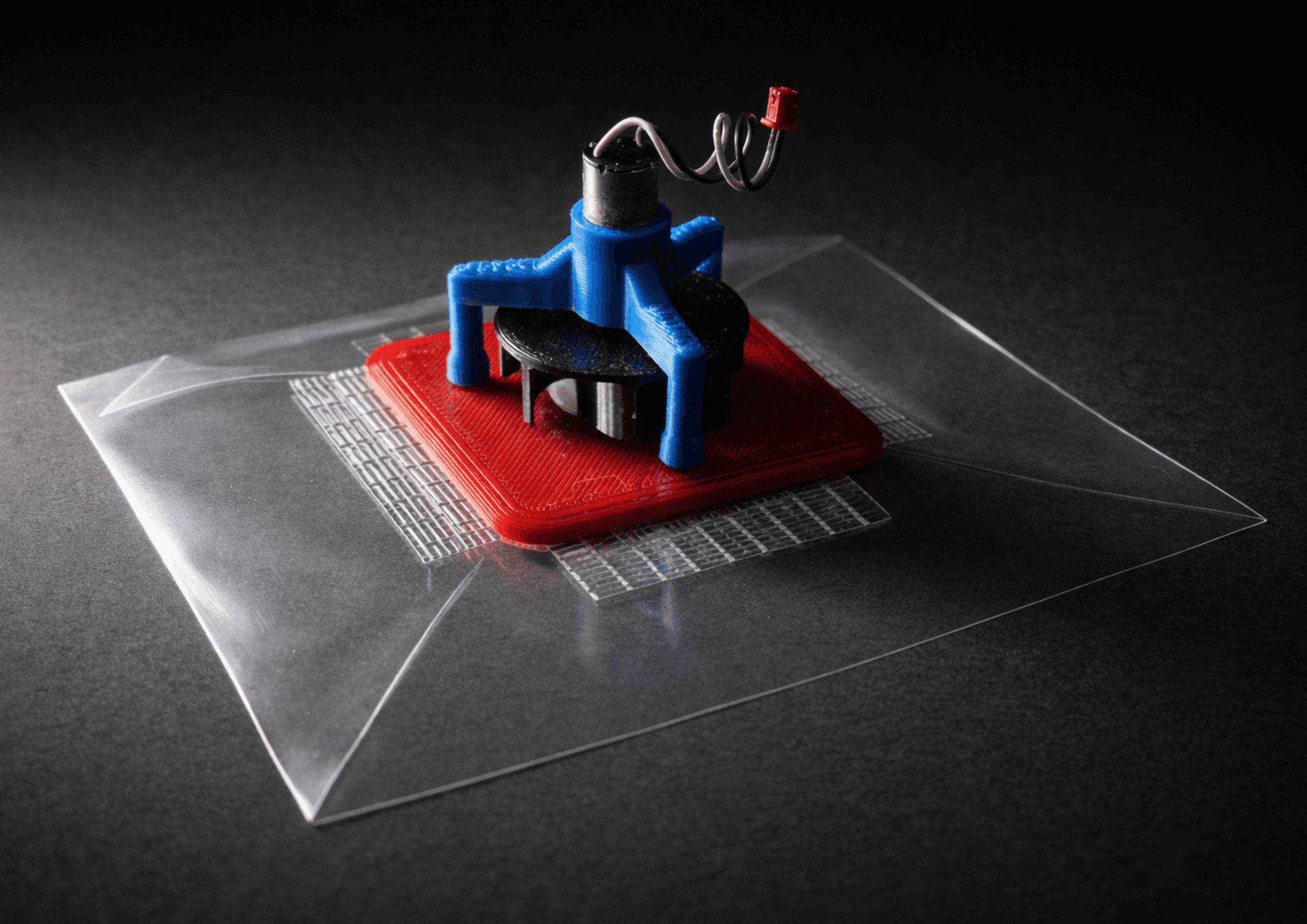
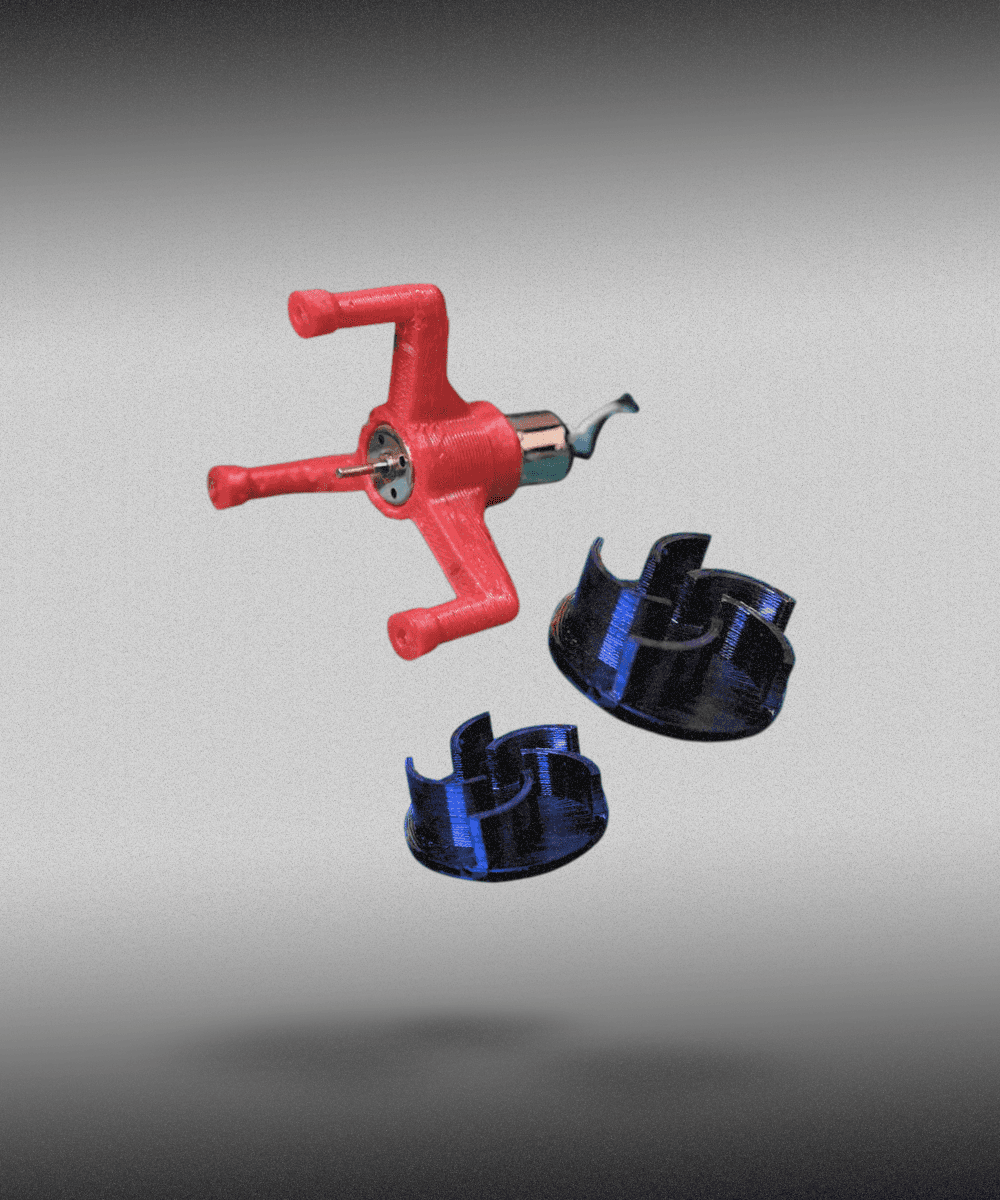
The Techgeeks Suction Impeller Setup is a compact active downforce module engineered for high performance LFR platforms. By utilizing a optimized impeller fan attached to a high speed coreless motor, it creates controlled negative pressure beneath the chassis to improve surface adhesion during demanding runs. Designed with a lightweight 3D printed housing and balanced structural geometry, it integrates seamlessly without disturbing weight distribution. The system enhances cornering stability, reduces slip at elevated speeds, and supports consistent performance across aggressive transitions — making it a focused upgrade for competition-driven builds.
Over 600gms of Powerful Downforce

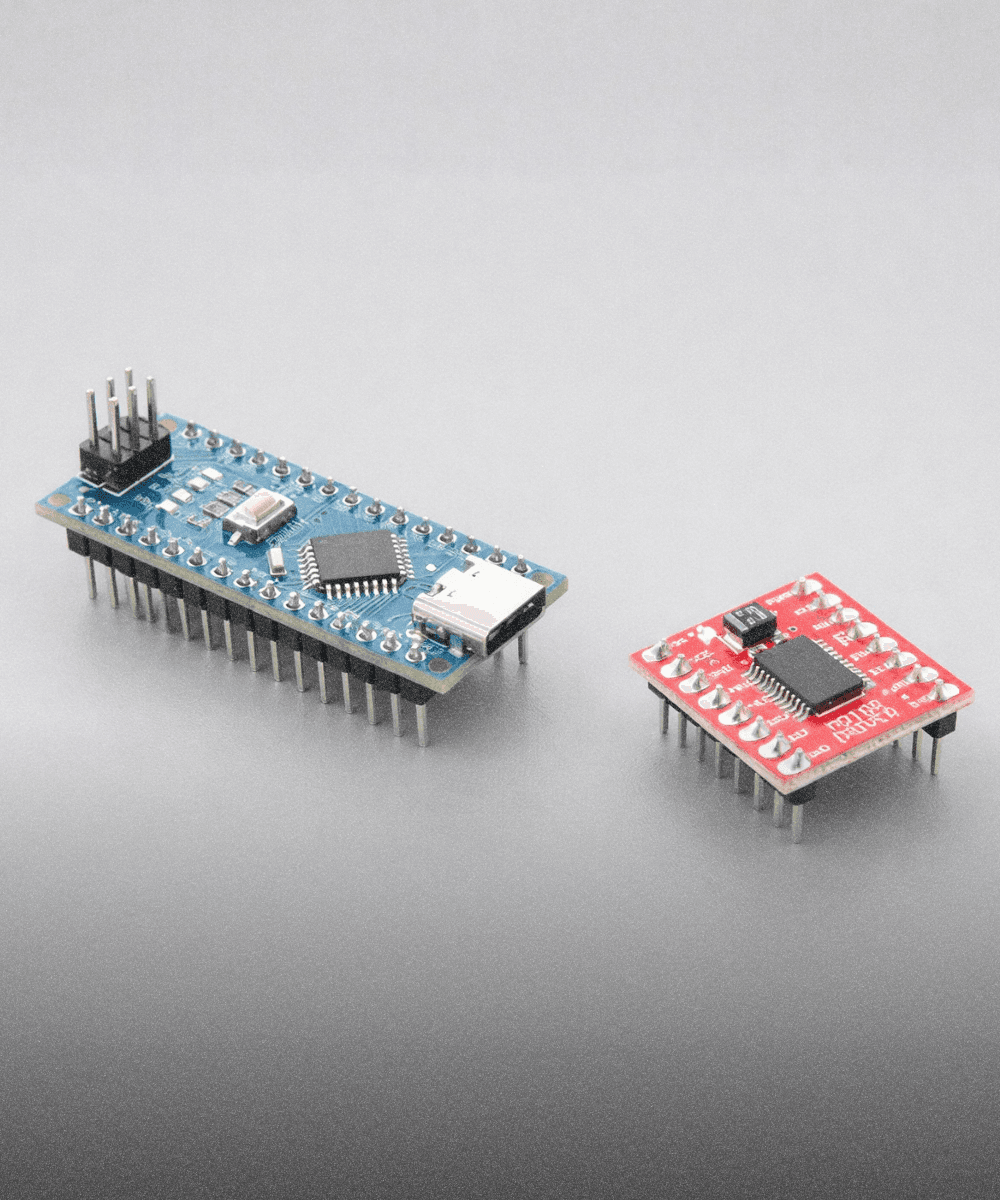
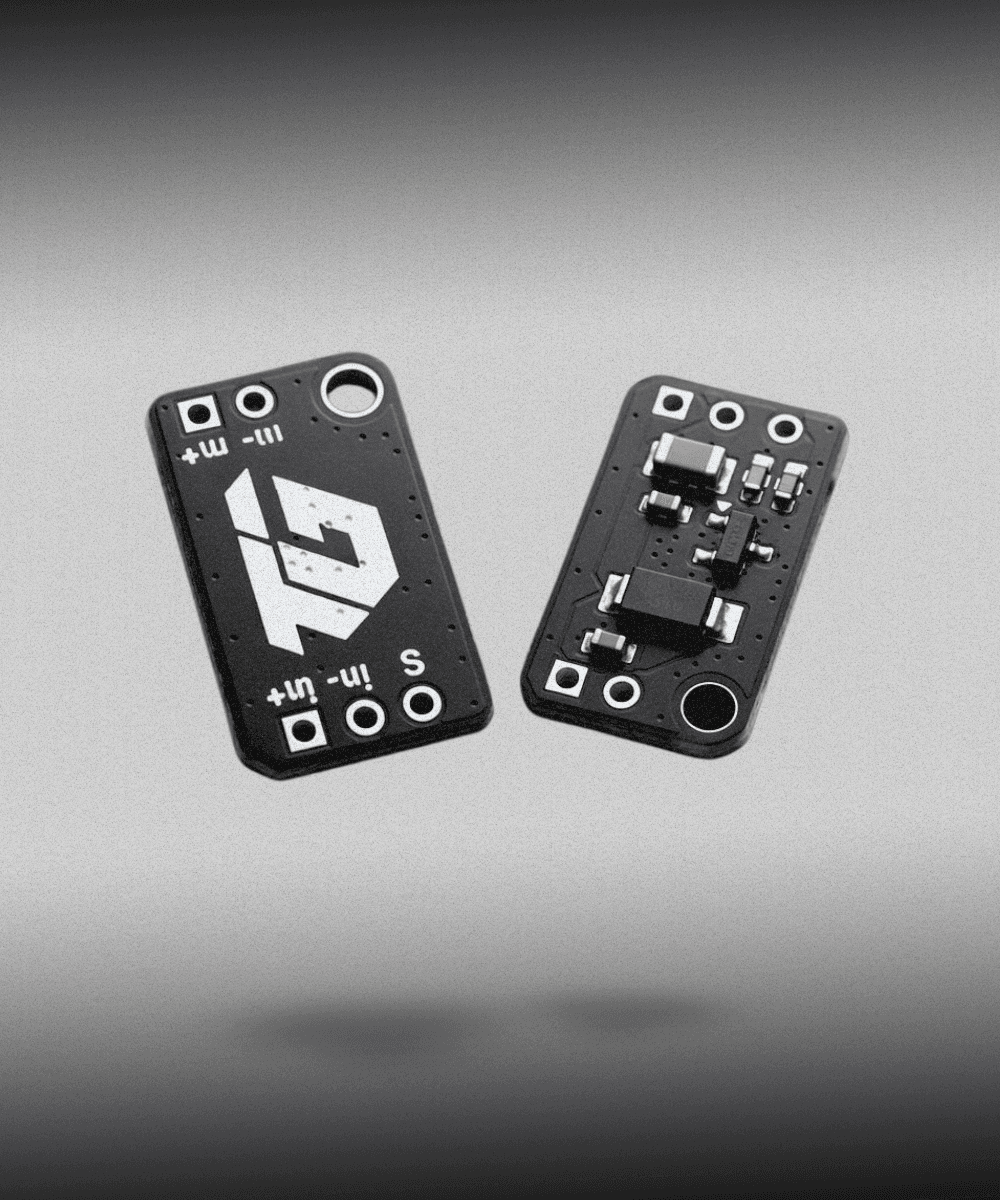
U.S.C. for controlling PWM (Speed) of Impeller Motor

ACCESSORIES
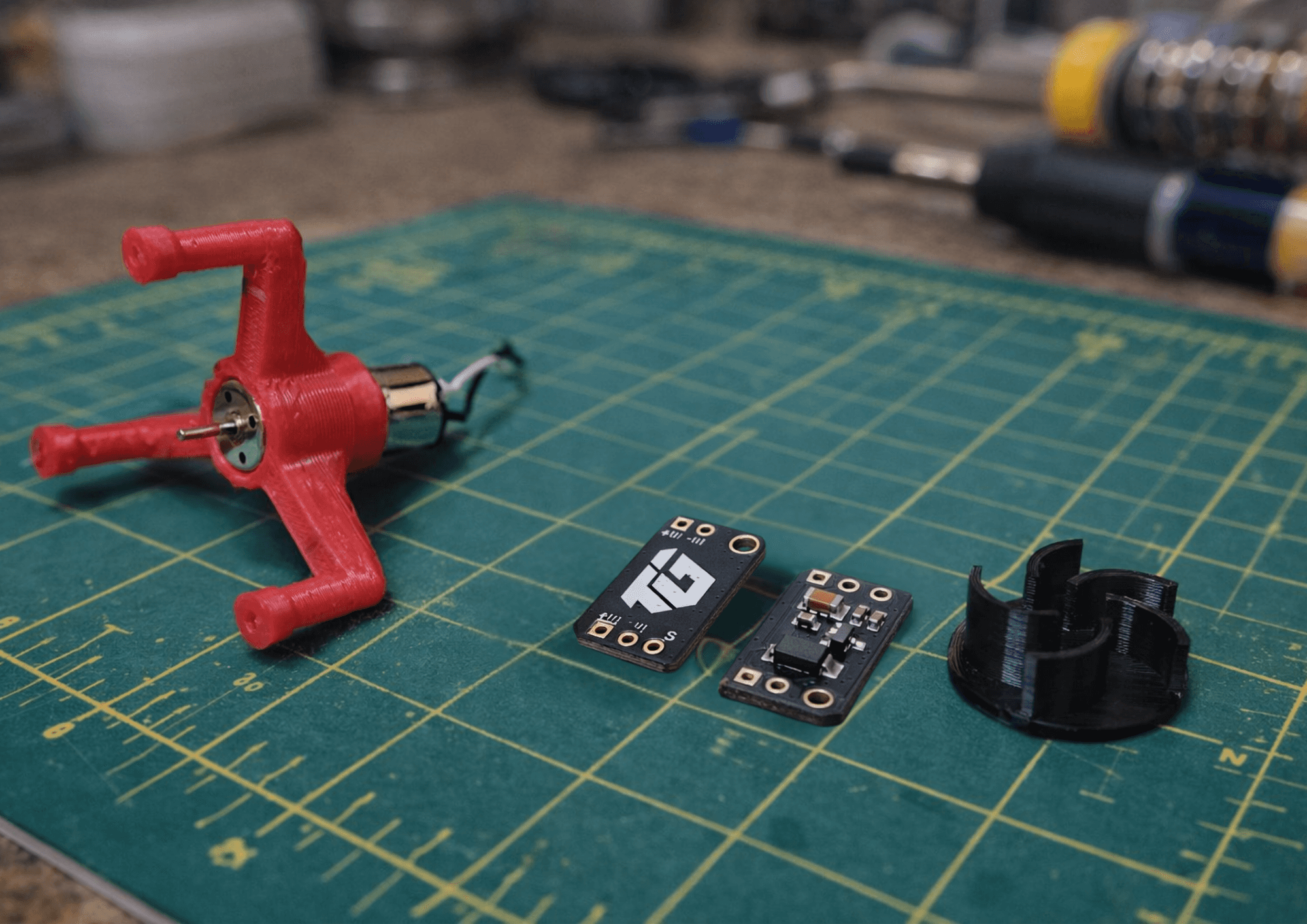
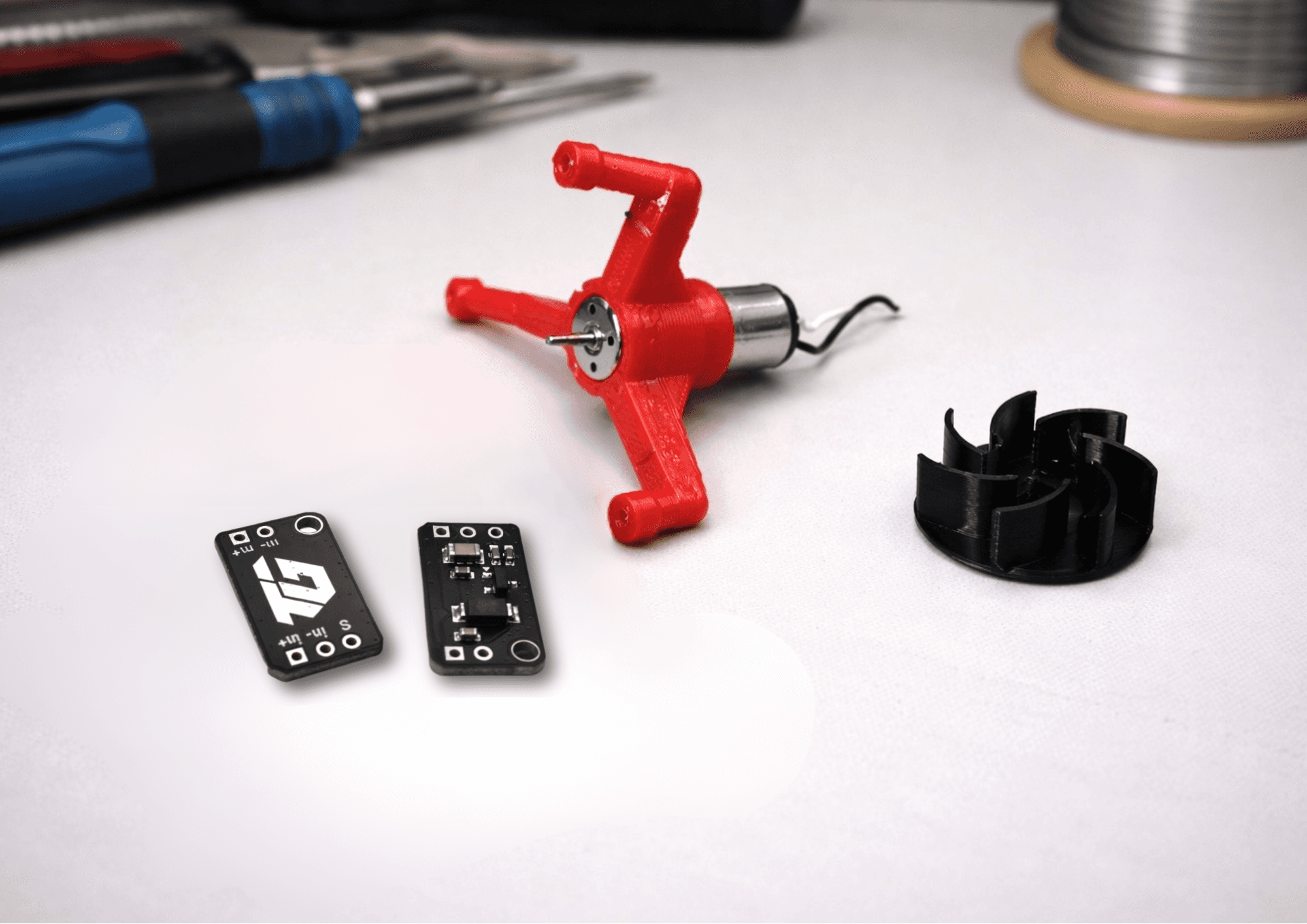
PACKED COMPONENTs
Good things come in small packages, and inside of
this you will find everything you need to get your
line follower up and running. Both hardware and
software included.


IMPELLER SETUP
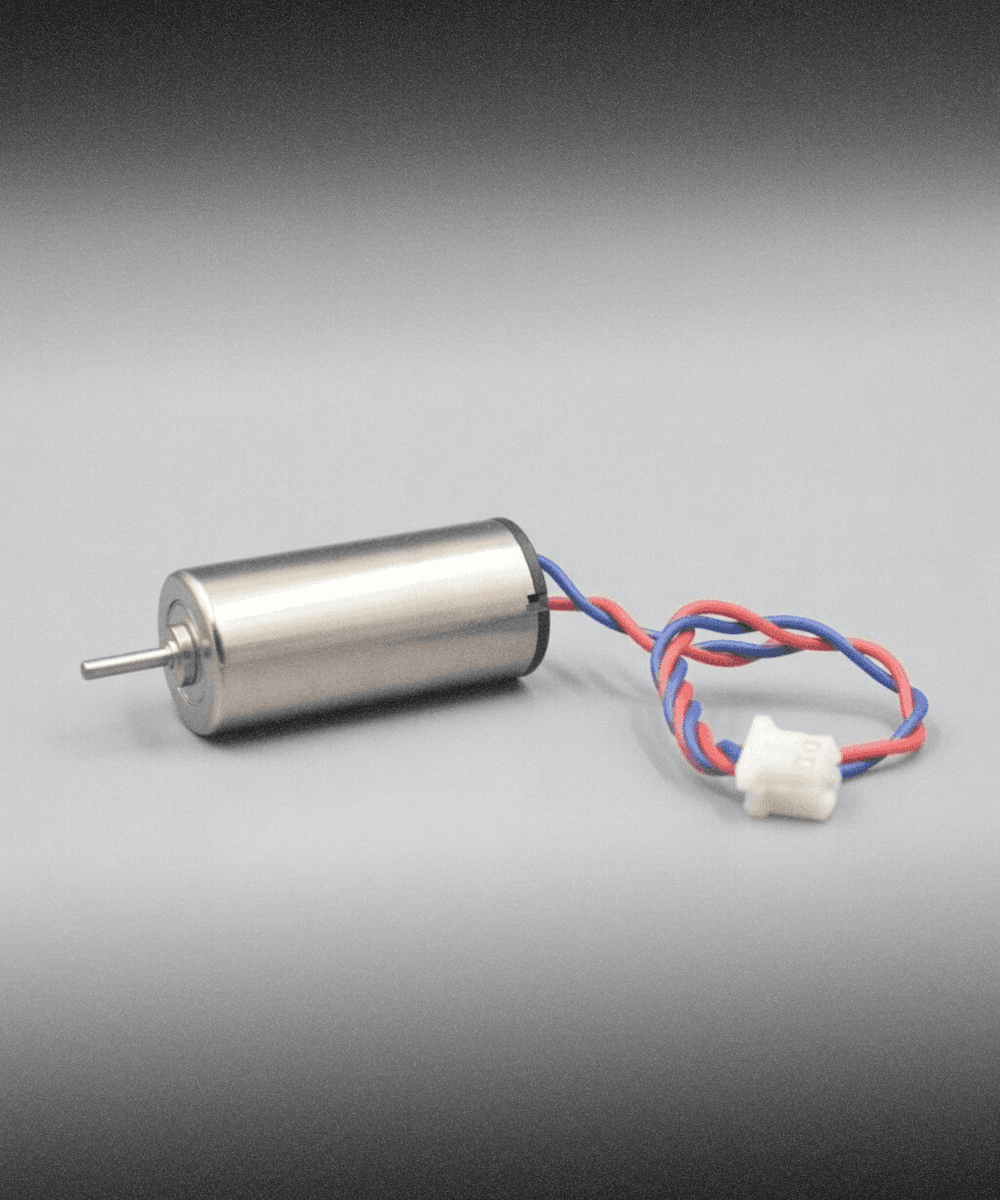
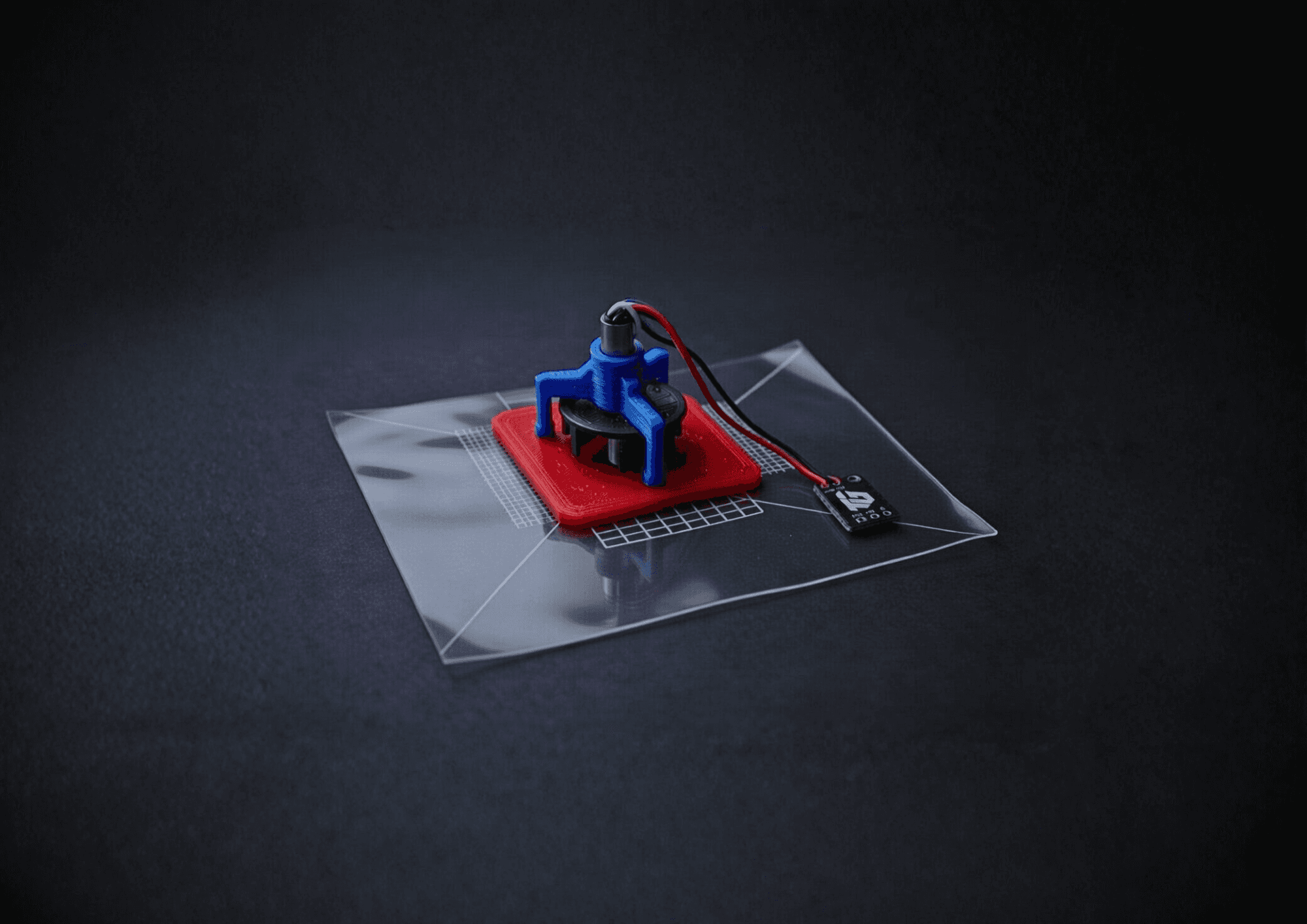
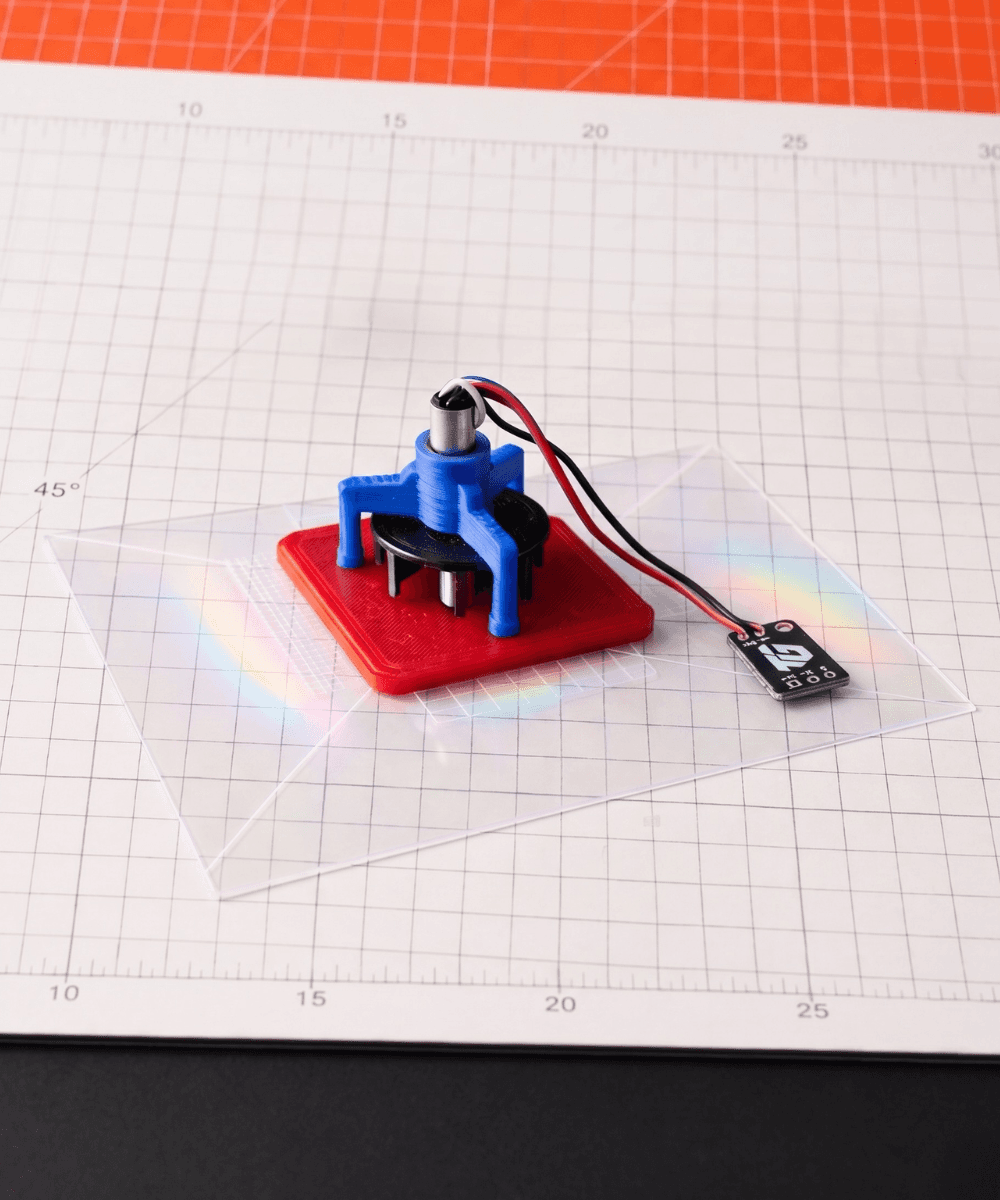
◘ The Impeller Setup is an active downforce module designed for high performance line follower robots. It uses a precision balanced centrifugal impeller driven by a Grade-A 8520 coreless motor to generate strong suction with minimal weight.
◘ The system operates through the USC (Unidirectional Speed Controller), a high current MOSFET based controller optimized for coreless motors. It utilizes high frequency PWM control for efficient operation.
◘ By creating a low pressure zone beneath the chassis, the impeller generates more than 600 grams of active downforce, significantly improving tire grip, cornering stability, and overall track performance.
◘ Lightweight construction, optimized airflow, and compact integration make the Impeller Setup an effective solution for competitive robots requiring maximum traction and speed.
SOFTWARE AND PROCESSING
◘ The Impeller Setup can be controlled using the ATmega328P's hardware Timer2 peripheral, configured in Fast PWM mode through direct register manipulation. This approach eliminates the overhead of software based PWM generation and provides precise, low latency speed control of the coreless impeller motor.
◘ The impeller output may be assigned to digital pin D11 (OC2A), which serves as the Timer2 Output Compare A channel. Once Timer2 is configured, PWM waveforms are generated entirely by hardware, allowing the microcontroller to maintain stable output without continuous CPU intervention.
◘ The setImpeller() function regulates motor power by writing duty cycle values directly to the OCR2A register. Since OCR2A is hardware linked to the OC2A output, any change in the register immediately adjusts the PWM duty cycle delivered to the USC, providing smooth and responsive impeller speed control.
◘ Operating through Timer2 and the dedicated D11 hardware PWM channel ensures efficient power delivery, high switching accuracy, and consistent impeller performance, making the system suitable for sustained active downforce generation in high speed robotic applications.
COLOR, MATTE
AND FINISH
Available in four color options, The matte chassis paired with high-traction rubber wheels and cleanly integrated components, delivering a cohesive, durable, and competition-ready finish.
*All the media present are for visual representation purposes only, actual product may vary.
Reviews (0)
01
What does the Impeller Setup do?
02
What is the advantage of active downforce over adding weight?
03
How can I integrate the impeller setup in my current chassis?
04
Can TechGeeks products be used for schools or institutions?
05
What is Techgeeks?
06
Do you offer support after purchase?
07
Do you ship across India?
08
How long does delivery take?
09
Do you ship internationally / overseas?



